
Fillerden İlham Alan Robotlar

Geleneksel robotlar, karmaşık gerçek dünya görevlerinde halen istenildiği kadar iyi performans veremiyorlar. Bazı robot bilimciler bu nedenle, sonsuz serbestlik derecesi ile karakterize edilen ve sabit sayıda eklem içermeyen robotik platformlar tasarlamaya çalışıyorlar.
Yeni geliştirilen robotlar tipik olarak, daha serbest hareket edebilen ve sabit bağlantı yapılarıyla sınırlandırılmayan kablolara veya diğer deforme olabilen bileşenlere dayanır. Bu avantajlara rağmen önerilen birçok robot tasarımı, henüz karmaşık ve yapılandırılmamış ortamlarda verimli bir şekilde gezinemez.
Araştırmacılar, kabloyla çalışan robotların deformasyondan sonra her zaman daire şeklinde profiller gösterdiğini keşfetti. Bu da değişen eğrilikli ortamlarla etkileşimlerini engelleyebildiği anlamına geliyor. Sınırlamanın üstesinden gelmek ve değişen eğriliklere sahip senaryolara uyum sağlamak için sürekli bir robotik paradigma önerilmeye çalışılıyor.
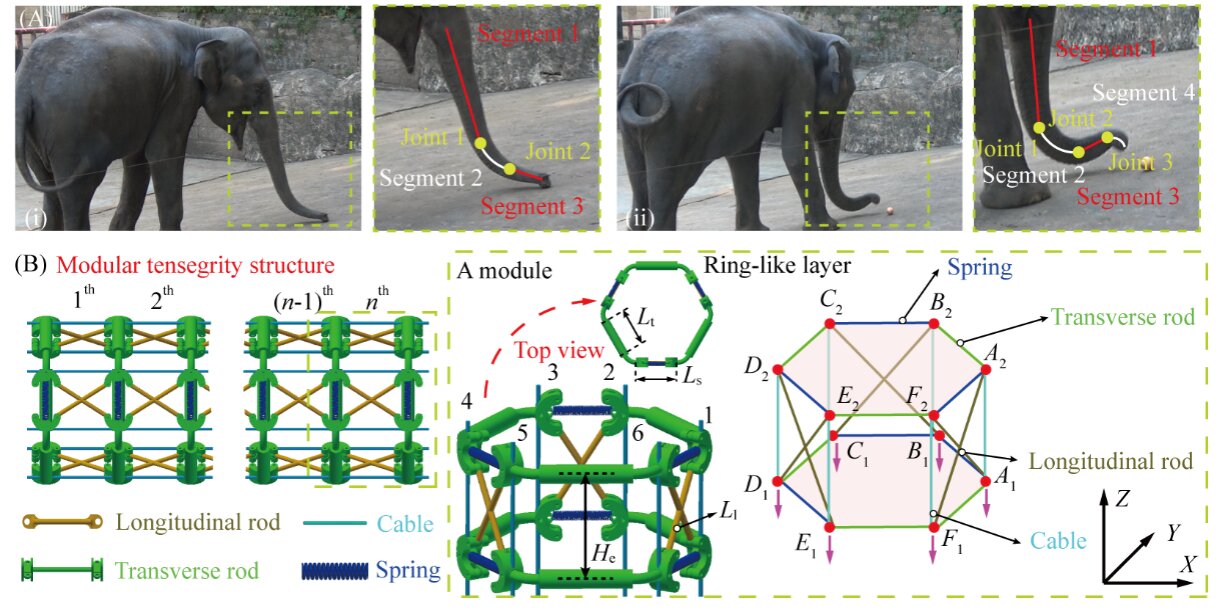
Fil gövdeleri doğal olarak eklemlerle birbirine bağlanan sonlu parçalara bölünmüştür. Örneğin hortumlarını esnek bir şekilde dar alanlara sıkıştırarak veya daha yüksek dallara ulaşarak, yapılandırılmamış ortamlarla daha verimli bir şekilde etkileşime girmesine olanak tanır .
Eşsiz yapıları nedeniyle, fil hortumlarının farklı bölümlerinin sertliği bağımsız olarak düzenlenebilir ve farklı şekillerde bükülmek üzere ayarlanabilir. Nihayetinde filin farklı görevlerin üstesinden gelmek ve çeşitli şekillere sahip nesnelere ulaşmak için hortumunun şeklini uyarlamasını sağlar.
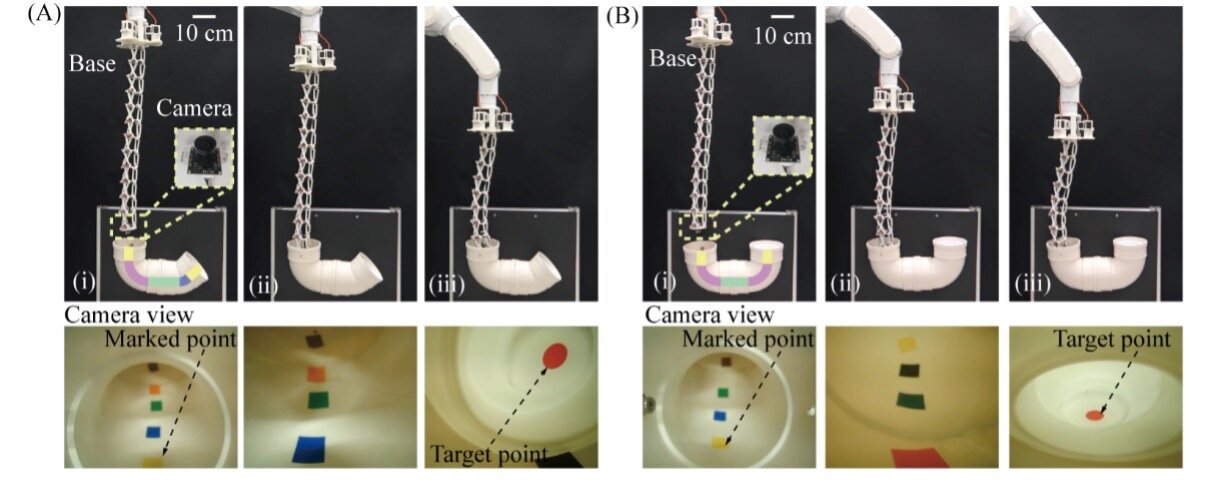
Fil hortumlarının hareketlerinden ilham alarak, robot problemi programlanabilir sertlik dağılımına sahip bir robotu geliştirildi. Sertlik dağılımını düzenleyerek, çeşitli modelleri farklı eğriliklere sahip boru hatlarında da hareket ettirebiliyor. Bu geliştirmeyle, sert eklem yapılarına sahip robotlar kullanılarak üstesinden gelinmesi zor veya imkansız olan gerçek dünya görevlerinin otomatikleştirilmesine yardımcı olabilir.


Yorumlar